一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人
阅读说明:本技术 一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人 (Knee joint active bending and stretching function exercise robot after artificial total knee joint replacement ) 是由 张冬艳 于 2021-06-23 设计创作,主要内容包括:本发明公开了一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人包括用于安装各部件的底座,底座上设置有用于固定大腿的大腿夹紧装置,前端设置有用于带动小腿达到活动膝关节的锻炼装置,底座上设置有自动调节座垫便于各种体型的使用者使用,大腿夹紧装置上设置有两段移动装置使发明对大腿进行的固定充分,前端锻炼装置可以实现多种不同的运动方式,满足各种膝关节恢复锻炼。本发明设置的两段夹紧辅助装置能使使用者在没有能力自主进行移动时也可以充分活动膝关节,且锻炼装置的多步骤辅助装置能最大度还原人在正常行走中的受力状况。(The invention discloses a knee joint active flexion and extension function exercise robot after artificial total knee joint replacement, which comprises a base used for mounting each part, wherein a thigh clamping device used for fixing a thigh is arranged on the base, an exercise device used for driving a shank to reach a movable knee joint is arranged at the front end of the base, an automatic adjustment seat cushion is arranged on the base and is convenient for users with various body types to use, two sections of moving devices are arranged on the thigh clamping device to fully fix the thigh, and the front end exercise device can realize various different motion modes and meet various knee joint recovery exercises. The two-section clamping auxiliary device arranged in the invention can ensure that the user can fully move the knee joint when the user does not have the ability to move autonomously, and the multi-step auxiliary device of the exercise device can maximally restore the stress condition of the user in normal walking.)
技术领域
本发明涉及一种锻炼机器人,特别涉及一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人
背景技术
膝关节损伤后锻炼一定要有科学计划,如果采用非手术治疗,康复周期会比较短一些。主要分两个阶段,伤后一周至六周左右,先从被动训练开始,按照关节承受限度,逐步增加主动锻炼;六周后可以更多增加关节灵活性和肌肉力量的训练,膝关节损伤后的恢复期要有科学合理安排,在伤后或者术后早期几天,首先要减轻炎症,缓解肿胀和疼痛,然后根据关节恢复进度,循序渐进地锻炼。如果膝关节损伤不用手术,仅采用操守方法治疗,恢复期会短一些。
申请号:2019103472280,此发明涉及一种训练椅,尤其涉及种风湿病人膝关节恢复训练椅。要解决的技术问题为:提供种能够使风湿病人的动作更加协调、能够提高训练效果的风湿病人膝关节恢复训练椅。此发明的技术方案是:一种风湿病人膝关节恢复训练椅,包括有底座、座椅、放置板、竖板、滑块、滑轨、d齿条、连接板等;底座顶部右侧固接有起支撑作用的座椅,座椅左侧的前后两侧均转动式安装有放置板,竖板固接于底座顶部左侧,竖板顶部和座椅底部左侧均连接有两个起导向作用的滑块,上方的两个滑块上滑动式设有滑轨。本发明通过齿轮和齿条的作用,能够使风湿病人的动作能够更加协调;通过固定机构可将风湿病人的脚固定,避免湿病人的脚从放置板上滑下来。此发明使膝关节的活动更加协调且将使用者脚固定避免滑落,但该发明无法有效还原膝关节在正常运动中的受力状况,且设置的固定机构不能固定调整腿部,本发明带有高灵敏调整装置,能够使膝关节在锻炼过程中受力状况还原正常走路状况,且设置有两端腿部辅助固定装置。
发明内容
本发明要解决的技术问题在于,针对现有技术上的缺陷,提供可以还原膝关节正常受力状态和对腿部稳定固定的功能,克服现有技术中固定性进行膝关节锻炼的问题和对腿部固定不够稳固的缺陷。
本发明解决其技术问题所采用的技术方案是:一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人包括底座,安装在底座中端的大腿夹紧装sf,安装在底座前端的锻炼装置,所述的锻炼装置通过锻炼底座下端与底座连接,锻炼底座上端通过连杆结构与弓形板转动连接,弓形板下端设置有用于带动弓形板转动的侧边伸缩轴,弓形板上端设置有锻炼保护板,锻炼保护板上设置有小腿夹具与驱动小腿夹具运动的锻炼驱动,连杆结构驱动弓形板移动,弓形板带动小腿夹具将小腿固定,锻炼驱动运动带动小腿夹具转动实现膝关节的运动,在运动过程中侧边伸缩轴根据使用者腿固定位置进行伸缩使弓形板转动,还原真实走路时膝关节受力状态,使恢复的效果更好。
进一步的,所述的底座包括底板,底板上设置有横架,横架一端设置有用于使用者乘坐可以自动伸缩的座垫,配合调整舒适坐姿。
进一步的,所述的大腿夹紧装置通过底板与底座连接,底板上端设置有横向齿轮与横向从动齿轮且横向齿轮与横向从动齿轮配合转动,横向从动齿轮内部设置有横向丝杆,横向丝杆前端设置有大腿升降柱,大腿升降柱侧边设置有转动大腿升降柱的纵向电机,大腿升降柱上端设置有用于夹紧大腿的大腿夹具,大腿夹具带有自动夹紧的大腿夹具驱动,横向丝杆转动时带动大d腿升降柱移动,大腿升降柱带动大腿夹具升降,大腿夹具驱动带动大腿夹具将大腿夹紧,保护使用者在使用过程中不会因固定不稳定而受伤。
进一步的,所述的连杆结构包括安装在锻炼底座上用于升降驱动的夹具升降柱,夹具升降柱两侧分别转动设置有横向收紧杆,横向收紧杆一端与夹具升降柱连接另一端与弓形板连接,所述的横向收紧杆顶端为转动设置,使弓形板实现横向转动。
进一步的,所述的锻炼装置还包括滑动安装在锻炼底座侧边用于为弓形板提供支撑的横向夹紧板,横向夹紧板通过侧边伸缩轴与弓形板连接。
进一步的,所述的锻炼驱动包括包括驱动电机,驱动电机上设置有旋转连杆,旋转连杆通过摆动连杆与小腿夹具连接,电机带动旋转连杆旋转使摆是动连杆带动小腿夹具进行摆动。
进一步的,所述的锻炼保护板侧边设置有弹簧,辅助锻炼保护板工作时进行移动。
本发明的工2作原理如下:工作时,使用者端坐在座垫上,腿部放置在大腿夹具与小腿夹具内,座垫自动进行调节使腿部舒适放置,大腿夹具开始收紧,通过横向齿轮带动横向从动齿轮转动,横向从动齿轮带动横向丝杆移动,横向丝杆前端带动纵向电机移动,纵向电机驱动大腿升降柱带动大腿夹具转动,使病人的大腿处于大腿夹具的舒适位置,大腿夹具驱动伸缩使大腿夹具夹紧大腿,同时下端夹具升降柱驱动横向收紧杆进行移动,横向收紧杆上端的弓形板随横向收紧杆移动,侧边伸缩轴辅助横向收紧杆进行夹紧,横向夹紧板在锻炼底座上滑动,小腿夹具将病人小腿固定好后,锻炼驱动带动小腿夹具转动,在转动的过程中因每个病人身体状况不一样,侧边伸缩轴根据小腿夹具转动的幅度进行调整弓形板的角度。
本发明与现有技术相比的有益效果是:(1)本发明设置的大腿夹紧装置具有三方向调整功能,将大腿稳定固定防止工作中脱落;(2) 本发明设置的锻炼装置具有多向转动功能,使病人的膝关节受力真实还原便于恢复;(3)本发明设置的座垫与两种夹具具有自动配合调整的功能,使各种不同体型g与身体状况的病人都达到舒适的姿势。
附图说明
图1为本发明整体结构示意图。
图2为本发明底座结构示意图。
图3为本发明大腿夹紧装置结构示意图。
图4为本发明锻炼装置结构示意图。
具体实施方式
在本发明以下的描34述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明以下的描述中,需要说明的是,除非另有明确规定和限定,术语“安装”、“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接连接,亦可以是通过中间媒介间接连接,可以是两个部件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
下面结合附图和示例性实施例对本发明作进一步地描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。此外,如果已知技术的详细描述对于示出本发明的特征是不必要的,则将其省略。
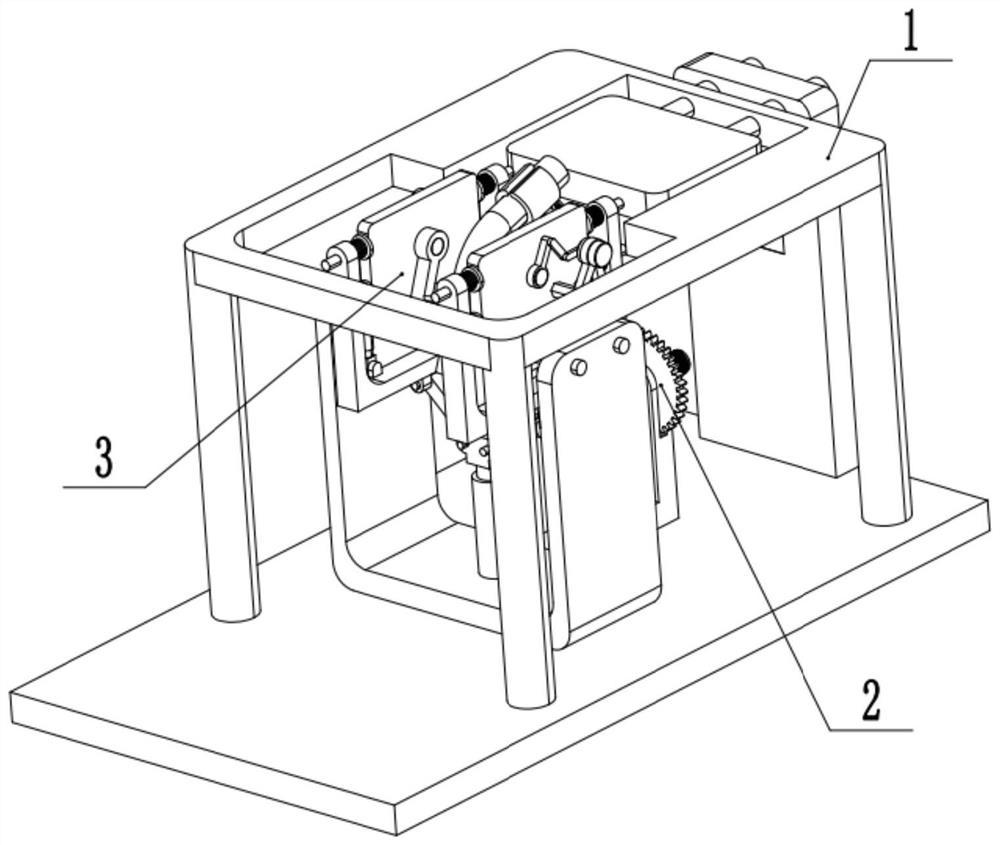
实施例:参考图1所示的一种人工全膝关节置换术后膝关节主动屈伸功能锻炼机器人,包括底座1,安装在底座1前端用于夹紧与带动小腿运动的锻炼装置3,中端设置有用于夹紧大腿的大腿夹紧装置 2。
参考图2所示的底座1,包括底板101,底板101上设置有用于其他部件安装的横架102,横架102上滑动设置有座垫103,座垫103 根据病人身体情况自动调节。
参考图3所示的大腿夹紧装置2,包括安装在底板101上的底板 201,底板201上设置有横向齿轮202,与横向齿轮202啮合设置有横向从动齿轮204,横向从动齿轮204内设置有用于驱动夹具移动的横向丝杠203,横向丝杠203前端设置有纵向电机205,纵向电机205中转动设置有用于带动夹具升降的大腿升降柱206,大腿升降柱206 上端转动设置有用于固定大腿的大腿夹具207,大腿夹具207后端设置有驱动大腿夹具207夹紧的大腿夹具驱动208,横向齿轮202带动横向从动齿轮204转
2动,横向从动齿轮204转动使横向丝杆203带动纵向电机205 移动,实现带动大腿夹具207横向移动,纵向电机205带动大腿升降柱206转动,大腿升降柱206伸缩带动大腿夹具207,大腿夹具207 位置调整好后大腿夹具驱动208带动大腿夹具夹紧。
参考图4所示的锻炼装置3,包括安装在底板101上的锻炼底座 301,锻炼底座301上设置有用于驱动小腿夹具升降的夹具升降柱302,夹具升降柱302通过转动设置的横向收紧杆303与弓形板304连接,弓形板304通过一端转动设置在弓形板304上的侧边伸缩轴305与横向夹紧板306连接,横向夹紧板306滑动安装在锻炼底座301上,弓形板304上设置有运动保护腿部的锻炼保护板308,锻炼保护板308 上设置有驱动夹具转动的锻炼驱动307,锻炼驱动307内部装由小腿夹具309,夹具升降柱302带动横向收紧杆303移动使夹具拉开,同时侧边伸缩轴305配合夹具升降柱302进行微调运动,将腿部固定更加稳定,腿部固定完成后夹具升降柱302停止运动,锻炼驱动307带动小腿夹具309进行摆动,在摆动过程中根据病人身体状况侧边伸缩轴305带动弓形板304在横向收紧杆303上轻微转动,使腿部在活动的过程中受力状况还原正常走路受力状况。
应当理解的是,以上实施例仅用以说明本发明的技术方案,而非对其限制,对本领域技术人员来说,可以对上述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而所有这些修改和替换,都应属于本发明所附权利要求的保护范围。
- 上一篇:一种医用注射器针头装配设备
- 下一篇:一种多轨迹膝关节康复训练机器人