首页
最新技术
特色专题
技术名词
热点聚焦
行业风向
登录
注册
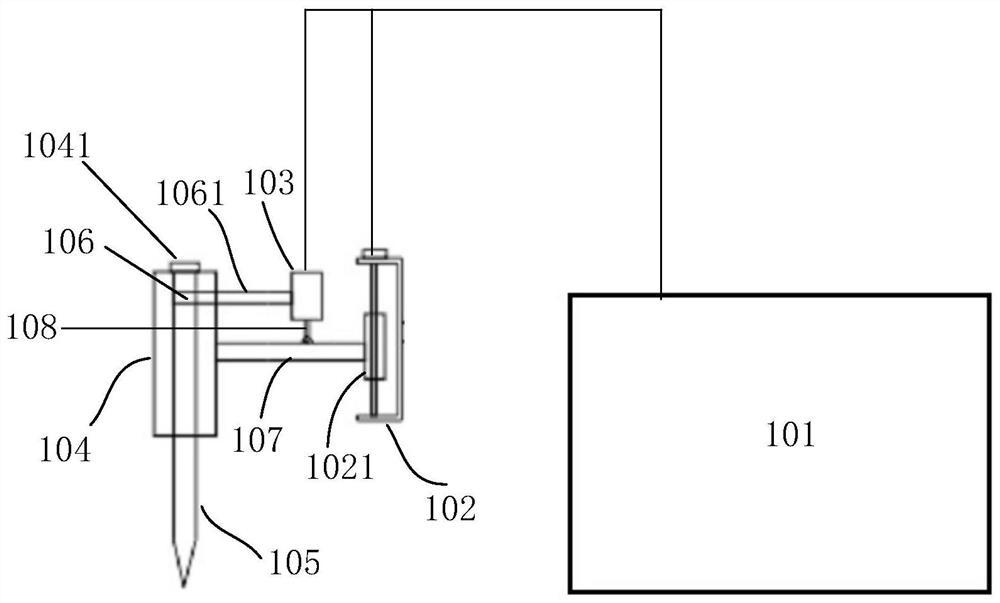
以机械手元件定位装置为特征的
口腔手术辅助装置及口腔手术机器人
本申请提供口腔手术辅助装置及口腔手术机器人,其中口腔手术辅助装置包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;控制系统分别与第一驱动装置、第二驱动电连接,第一驱动装置上的滑动结构通过连接件与钻针壳体固定连接;钻针可拆卸的插装在钻针壳体内;第二驱动装置安装在连接件和/或滑动结构上,第二驱动装置通过传动结构驱动钻针壳体内的钻针转动。本申请提供的口腔手术辅助装置结构简单,使用方便,有效的降低了设备成本,易于行业推广使用。
2021-11-05
访问量:59
一种基于智能制造的多功能机械夹头
本发明涉及智能制造技术领域,且公开了一种基于智能制造的多功能机械夹头,包括第一固定外壳,所述第一固定外壳的上表面右侧固定连接有第二固定外壳,所述第二固定外壳的右侧下表面固定连接有第三固定外壳,所述第二固定外壳的上表面固定连接有连接桩,所述第三固定外壳的内壁左侧后侧固定连接有电机,使用时下卡块卡进上卡块的下侧卡接处,此时反转电机的输出杆放松拉绳使第一弹簧恢复形状将固定盒提升,由于固定盒内部气体已被挤出,并在第二弹簧的伸展下使固定盒内部形成负压,使吸盘可以吸附住产品,达到便于移动的效果,达到了对外壁较为光滑的较薄产品进行移动的目的。
2021-11-02
访问量:27
一种电动夹爪
本申请实施例提供了一种电动夹爪,包括夹持机构、第一驱动机构、第一传动机构和第二驱动机构;所述夹持机构、第一驱动机构、第一传动机构和第二驱动机构依次相互连接,所述第二驱动机构驱动所述第一传动机构、第一驱动机构和夹持机构转动,所述第一驱动机构驱动所述夹持机构开合。本发明实施例能够同步实现夹持机构的直线移动与旋转功能,使用方便。
2021-11-02
访问量:32
一种旋转型电动夹爪
本申请实施例提供了一种旋转型电动夹爪,包括:夹持机构,第一传动机构、第二传动机构和控制机构;所述第一传动机构和第二传动机构并列设置在所述夹持机构和控制机构之间,所述第一传动机构和第二传动机构分别与控制机构连接,所述第一传动机构与夹持机构连接,所述控制机构通过第一传动机构驱动夹持机构开合运动,所述控制机构通过第二传动机构驱动第一传动机构和夹持机构旋转。本申请电动夹爪可以实现无限旋转,结构紧凑,使用方便。
2021-11-02
访问量:28
一种基于物联网的照明机器人
本发明涉及一种基于物联网的照明机器人,包括固定箱、固定杆、转动板、两个灯体和两个灯罩,所述固定杆竖向设置,所述固定箱设置在固定杆的顶端,所述转动板水平设置在固定箱的一侧,所述灯罩的形状为长方体,两个灯罩分别设置在转动板的顶部和底部,所述灯体与灯罩一一对应,所述灯体设置在灯罩内,所述固定箱内设有智能系统和信号传递系统,所述固定箱上设有散热机构和转换机构,所述转换机构包括转动轴、第一轴承和锁紧组件,该基于物联网的照明机器人通过转换机构实现了转换灯体的功能,防止灯体损坏后无法正常实现照明,不仅如此,还通过散热机构实现了散热的功能。
2021-11-02
访问量:13
一种重型长棒料的机器人夹取方法
本发明属于工业机器人上下料领域,机器人夹爪采用双平行夹爪结构,使用两个伺服电机作为动力驱动,伺服电机带动左右两个个夹爪进行夹紧松开的动作。当机器人夹爪夹紧这种直径段不同的且长度较长的重型长棒料零件时,通过PLC分别两个控制伺服电机正转,输出设定转矩来加紧棒料零件;当机器人夹爪松开这种直径段不同的且长度较长的重型长棒料零件时,通过PLC分别两个控制伺服电机反转,感应接近开关来松开棒料零件。
2021-11-02
访问量:24
一种用于电池壳体制造的丝杆驱动型二次元伺服机械手
本发明涉及电池壳体制造技术领域,具体是涉及一种用于电池壳体制造的丝杆驱动型二次元伺服机械手,包括水平导轨、第一支撑座、第二支撑座、第一驱动组件、第二驱动组件和夹爪组件,通过第一支撑座上的第一驱动组件,驱动丝杆转动,丝杆带动了第二支撑座上的驱动滑台移动,驱动滑台下方的第一齿条使得第二驱动组件移动,通过第一驱动组件驱动水平导轨做直线往复运动,使得第二驱动组件驱动两个水平导轨相互靠近或者远离,从而带动夹爪组件对于电池壳体进行夹取的同时,并向前传送带,从而解决了通过单一驱动源对于电池壳体移动的技术问题,成本低廉,操作简单,便于调节。
2021-11-02
访问量:25
一种基于折纸原理的模块化软体驱动器
本发明涉及一种基于折纸原理的模块化软体驱动器,包括主体、下底面以及模块化连接结构,主体为立方体抽壳结构,其由五个相同的正方形面构成,且有纸基限制层安装在内部,纸基限制层上有小孔构成的折痕;下底面中间有沉孔和与之相连的圆形侧孔,硅胶管与圆形侧孔配和;下底面直接和方形主体胶连,模块化连接结构由凸结构和凹结构组成,两种结构分别和主体以及下底面胶连;硅胶管接通气源后,软体驱动器根据纸基限制层折痕实现不同的运动,并在与大气连接后回复。本发明通过不同的折痕设计,就可实现多种运动形式,制造简单,且由于采用负压驱动,不会因气压太大而损坏,输出性能优异。
2021-11-02
访问量:14
一种注塑机运转机械手及其伸缩装置
本发明公开了一种注塑机运转机械手及其伸缩装置,涉及注塑加工技术领域,解决了现有的注塑加工转运机械手在使用中不能对抓取范围进行调节,也不能对抓取角度进行调节影响了机械手的适用范围的问题,包括机械臂主体;伸缩臂,所述伸缩臂滑动连接在机械臂主体的右侧;伸缩驱动结构,所述伸缩驱动结构设置在机械臂主体的前端面右侧,伸缩驱动结构带动伸缩臂伸缩;转动轴,所述转动轴转动连接在伸缩臂的后端面。本发明实现了对机械手吸盘的安装角度的调节,实现了对不同直径注塑产品的抓取,同时还可以实现对注塑产品的不同位置的抓取,保证良好的抓取效果,调节简单,提高了机械手的应用范围。
2021-11-02
访问量:26
一种五轴自动码砖机器人
本发明公开了一种五轴自动码砖机器人,包括底座、腰部、大臂、小臂、腕部和末端执行机构;通过安装在五个轴上的五个伺服电机和RV减速器五个输入动力,J1轴伺服电机和J1轴RV减速器带动腰部实现正负165°旋转运动,J2轴伺服电机和J2轴RV减速器带动大臂实现俯仰运动,J3轴伺服电机和J3轴RV减速器带动小臂实现俯仰运动,J4轴伺服电机和J4轴RV减速器带动腕部实现俯仰运动,J5轴伺服电机和J5轴RV减速器带动末端执行结构实现回转运动,气缸控制夹爪的开合,从而实现对空心砖的夹取动作。
2021-11-02
访问量:25
«
1
2
3
4
5
6
7
8
»
热门专题
左旋肉碱的制备方法 左旋肉碱生产工艺 左旋肉碱相关技术资料
免烧砖的制造方法及应用 免烧砖相关专利技术
水溶肥制备方法和应用 水溶肥相关技术资料
保温砂浆及其制备方法 保温砂浆相关技术资料
聚羧酸减水剂的配方 聚羧酸减水剂制备方法 聚羧酸减水剂相关技术资料
除湿机的结构设计 新型工业除湿机的制造 除湿机相关技术资料
脱硫剂的制备方法及系统 脱硫剂数字化评价装置及其评价方法
硅基材料的生产工艺 新型硅基负极材料 硅基材料相关生产制备工艺
柔性电池的制备方法 柔性电池的工艺原理 柔性电池相关生产制备技术资料
汽车充电桩的设计原理 新型汽车充电桩 汽车充电桩的生产制造设计工艺
技术分类
记录或重放系统
流体的
电的
程序控制
流体的
电的
以机械手元件定位装置为特征的
以部件结构为特征的
以多铰接爪臂为特征的
除工作头自身运动外,至少有一个爪臂旋转,例如柱面坐标型或极坐标型
以臂的运动为特征的,例如直角坐标型的
程序控制机械手
微型机械手
与操作人员控制室连接的机械手
导轨也运动,例如移动桥式起重机型的
沿导轨移动的
装在车轮上或车厢上的机械手
有伺服机构
有主单元和从单元的平行四边形偶联器
主从型机械手,即兼有控制单元和被控制单元共同完成相应的空间运动
手套式操作箱,即用人手放入装在容器壁上的手套中操纵机械手的容器;所用的手套
带操纵装置的容器
安全装置
观察装置
读出装置
与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置
挠性的
可旋转的
可伸长的
爪臂
肘节
接头
带挠性的抓手构件
带三个或多个抓手构件
有抓手构件
带真空或磁力夹持装置
带遥控卸下或更换夹头或其零件的装置
随动的
夹头
通过读出装置,例如观察或触摸装置
拨打电话
下载资料
栏目导航
会员登录