首页
最新技术
特色专题
技术名词
热点聚焦
行业风向
登录
注册
程序控制
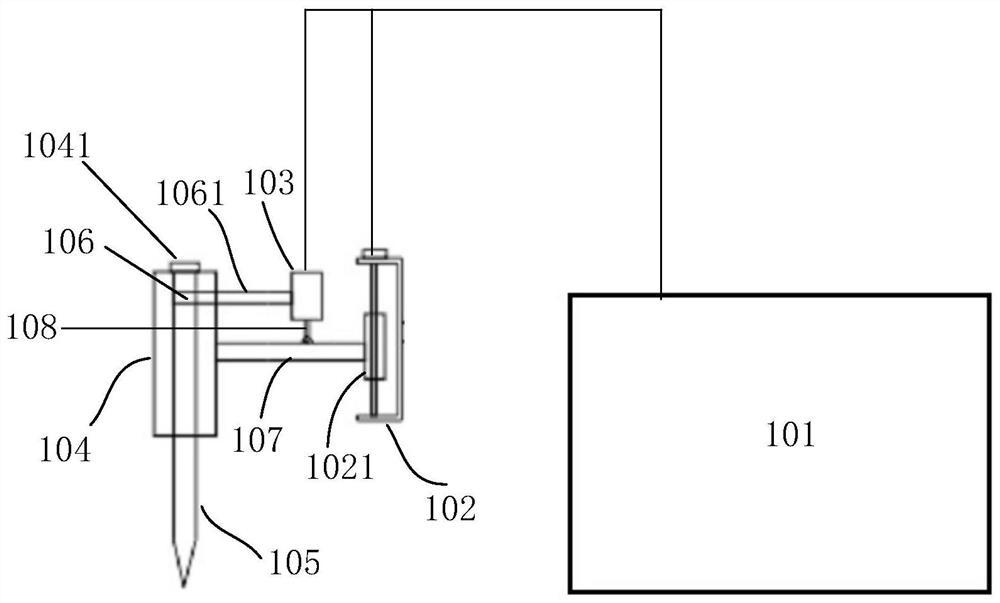
口腔手术辅助装置及口腔手术机器人
本申请提供口腔手术辅助装置及口腔手术机器人,其中口腔手术辅助装置包括:控制系统、第一驱动装置、第二驱动装置、钻针壳体和传动结构;控制系统分别与第一驱动装置、第二驱动电连接,第一驱动装置上的滑动结构通过连接件与钻针壳体固定连接;钻针可拆卸的插装在钻针壳体内;第二驱动装置安装在连接件和/或滑动结构上,第二驱动装置通过传动结构驱动钻针壳体内的钻针转动。本申请提供的口腔手术辅助装置结构简单,使用方便,有效的降低了设备成本,易于行业推广使用。
2021-11-05
访问量:59
可以减少由于网络的时间差引起的误操作的机器人与控制系统
机器人被配置为根据操作者经由网络做出的操作指示而运动。该机器人包括运动图像采集单元,接收单元,运动目的地预测单元和自主控制单元。运动图像采集单元被配置为捕获机器人周围的环境作为运动图像。接收单元被配置为接收操作指示。运动目的地预测单元被配置为基于由接收单元接收的操作指示来预测机器人的运动目的地。自主控制单元被配置为基于在接收到操作指示的时刻从运动图像获得的环境的信息,自主地校正根据操作指示到运动目的地的运动。
2021-11-02
访问量:36
用于确定机器人坐标系与可移动装置坐标系之间的关系的方法和控制装置
一种用于确定机器人(10)的机器人坐标系(R)与可移动装置(20)的MA坐标系(MA)之间的关系的方法和控制装置,可移动装置(20)包括传感器设备(22)和定位机构(26),定位机构(26)被配置为在MA坐标系(MA)中定位传感器设备(22)的传感器坐标系(C),其中标记(16)被布置成与机器人(10)上的参考位置(14)成固定关系。方法包括:相对于机器人坐标系(R)在多个不同姿态中定位(S10)标记(16)。针对多个不同姿态中的每个姿态,方法包括:在传感器信息的基础上,确定(S12)传感器坐标系(C)与标记坐标系(M)之间的关系确定(S13)MA坐标系(MA)与传感器坐标系(C)之间的关系确定(S14)机器人坐标系(R)与参考位置坐标系(E)之间的关系该方法还包括在多个不同姿态中,使用关系关系以及关系确定(S20)关系
2021-11-02
访问量:27
一种三臂耦合夹持式输电线路巡检避障、清障装置
本发明公开了一种三臂耦合夹持式输电线路巡检避障、清障装置,属于电路巡检装置技术领域;一种三臂耦合夹持式输电线路巡检避障、清障装置,包括有配重箱体,配重箱体的内部固定安装有清障机构和集成控制装置,配重箱体和连接架上连接有三臂耦合夹持式巡检装置,三臂耦合夹持式巡检装置包括有前臂耦合夹持式巡检机构、中臂耦合夹持式巡检机构和后臂耦合夹持式巡检机构,前臂耦合夹持式巡检机构、中臂耦合夹持式巡检机构和后臂耦合夹持式巡检机构均包括有弧形调整机构、开合机构和双轮耦合行走机构;本发明有效解决了现有设计结构复杂,重量大,多关节耗能多,越障不易控制,不能实现转角塔越障,无法清除异物障碍以及设备爬坡能力较差的问题。
2021-11-02
访问量:28
一种机器人的视觉伺服控制方法、装置以及设备
本申请提提供了一种机器人的视觉伺服控制方法、装置以及设备,用于结合小波变换,提供更为细腻、精确地视觉反馈信号。方法包括:在当前一轮控制环节中,获取配置于机器人预设部位上的摄像机拍摄得到的第一图像I;对第一图像进行图像识别处理,得到第一图像的第一视觉特征W;获取上一轮控制环节中机器人运动控制指令期望得到的第二图像I*的第二视觉特征W*;以第一视觉特征W与第二视觉特征W*之间的视觉误差e为基础,结合预先建立的小波系数的时变与机器人空间速度之间的相互作用模型,确定当前一轮控制环节中的机器人运动控制指令;控制机器人的运动模块执行当前一轮控制环节中的机器人运动控制指令,促使机器人按照预设运动状态进行运动。
2021-11-02
访问量:15
一种基于垃圾分类识别系统的人工智能机器人
本发明公开了一种基于垃圾分类识别系统的人工智能机器人,涉及垃圾分类机器人技术领域;为了能够移动的采集垃圾并进行分类;具体包括垃圾分类识别系统,所述垃圾分类识别系统包括控制模块、驱动模块、图像采集处理模块、信号接收模块、显示模块、语音播报模块和垃圾采集模块;所述控制模块分别与驱动模块、图像采集处理模块、信号接收模块、显示模块、语音播报模块和垃圾采集模块之间信号连接。本发明通过设置固定板、活动板和抓杆等结构,能够通过控制电机工作,电动活动板平移,从而在联动口和滑动腔的限位下,使抓杆的一端偏转,抓杆基于转动套筒的安装轴实现转动,从而促使夹爪头张开或闭合,达到抓取或放下垃圾的目的。
2021-11-02
访问量:19
自适应麻包姿态的抓取装置
本发明揭示了一种自适应麻包姿态的抓取装置,包括底板以及呈对称结构设置在其两侧的柔性件,每一所述柔性件的底部均固设有一抓取组件,所述柔性件包括固设在所述底板上的固定座以及固设在所述固定座上的直线轴承,所述直线轴承内设有一与浮动连轴,所述浮动连轴的容置端延伸置于所述固定座的容置腔内;所述浮动连轴上还设有一承载腔,所述承载腔和容置腔内配置界定一弹簧。本发明的有益效果主要体现在:抓取组件相互配合将麻包抓取,柔性件可带动抓取组件上下微距离调整,防止抓取组件将麻包内的原料压损,保证合格率。同时,该装置通过机械实现抓取,代替人工抓取,从而提高抓取效率,以及能够方便用户使用,替用户节约人力。
2021-11-02
访问量:24
一种拟人化机器人的交互方法、装置、设备及存储介质
本申请公开了一种拟人化机器人的交互方法、装置、设备及存储介质,该方法包括:目标机器人首先主动采集周围预设范围内的环境信息;其中,环境信息包括声音信息、图像信息、以及目标机器人与他人的接触信息中的至少一项,然后利用环境信息,识别出周围预设范围内用户的身份信息和情绪状态;接着,根据用户的身份信息和情绪状态,主动向用户反馈符合其情绪状态的语音信息、表情信息或动作信息等拟人化交互信息。可见,由于本申请中目标机器人是通过主动采集周围的环境信息,来识别出周围家庭成员等用户的情绪状态,并主动向用户反馈符合其情绪状态的语音或动作等拟人化的交互信息,不仅提高了这些机器人的拟人化程度,也提高了用户的使用体验。
2021-11-02
访问量:21
自主移动装置及仓储物流系统
一种自主移动装置,包括:感测组件、处理器及驱动组件。所述感测组件用于感测物体的信息;所述处理器用于依据所述信息判断所述物体是否为可移动物体,并依据判断结果来产生控制信号,其中所述控制信号用于指示所述自主移动装置的避障距离;所述驱动组件用于驱动所述自主移动装置以进行移动,其中当所述物体位于所述自主移动装置的行进路径上时,所述驱动组件以至少所述避障距离驱动所述自主移动装置进行避障。一种仓储物流系统,包括多个所述自主移动装置以及调度伺服器。所述调度伺服器,用于自其中一个所述自主移动装置接收避障信息,并发送行进信号以指示所述其他自主移动装置继续行进或暂停行进。
2021-11-02
访问量:28
一种大型铸件加工装置以及加工方法
本发明公开了一种大型铸件加工装置以及加工方法,本发明通过旋转平台用于放置大型铸件且活动设置于运输导轨,第一相机模块位于旋转平台的上侧且用于获取大型铸件的上表面数据;第二相机模块用于获取大型铸件的侧面数据;主控模块用于根据上表面数据以及侧面数据进行分析处理确定加工位置,并控制机器人根据加工位置对大型铸件进行加工;大型铸件放置在旋转平台即可以采集大型铸件的上表面数据以及侧面数据,并通过主控模块处理即可确定加工位置,然后控制机器人根据加工位置对大型铸件进行加工,不需要额外定制专用夹具且能自动完成大型铸件的加工过程,降低了成本且提高了适用性,本发明可广泛应用于加工技术领域。
2021-11-02
访问量:21
«
1
2
3
4
5
6
7
8
...
46
47
»
热门专题
左旋肉碱的制备方法 左旋肉碱生产工艺 左旋肉碱相关技术资料
免烧砖的制造方法及应用 免烧砖相关专利技术
水溶肥制备方法和应用 水溶肥相关技术资料
保温砂浆及其制备方法 保温砂浆相关技术资料
聚羧酸减水剂的配方 聚羧酸减水剂制备方法 聚羧酸减水剂相关技术资料
除湿机的结构设计 新型工业除湿机的制造 除湿机相关技术资料
脱硫剂的制备方法及系统 脱硫剂数字化评价装置及其评价方法
硅基材料的生产工艺 新型硅基负极材料 硅基材料相关生产制备工艺
柔性电池的制备方法 柔性电池的工艺原理 柔性电池相关生产制备技术资料
汽车充电桩的设计原理 新型汽车充电桩 汽车充电桩的生产制造设计工艺
技术分类
记录或重放系统
流体的
电的
程序控制
流体的
电的
以机械手元件定位装置为特征的
以部件结构为特征的
以多铰接爪臂为特征的
除工作头自身运动外,至少有一个爪臂旋转,例如柱面坐标型或极坐标型
以臂的运动为特征的,例如直角坐标型的
程序控制机械手
微型机械手
与操作人员控制室连接的机械手
导轨也运动,例如移动桥式起重机型的
沿导轨移动的
装在车轮上或车厢上的机械手
有伺服机构
有主单元和从单元的平行四边形偶联器
主从型机械手,即兼有控制单元和被控制单元共同完成相应的空间运动
手套式操作箱,即用人手放入装在容器壁上的手套中操纵机械手的容器;所用的手套
带操纵装置的容器
安全装置
观察装置
读出装置
与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置
挠性的
可旋转的
可伸长的
爪臂
肘节
接头
带挠性的抓手构件
带三个或多个抓手构件
有抓手构件
带真空或磁力夹持装置
带遥控卸下或更换夹头或其零件的装置
随动的
夹头
通过读出装置,例如观察或触摸装置
拨打电话
下载资料
栏目导航
会员登录