首页
最新技术
特色专题
技术名词
热点聚焦
行业风向
登录
注册
与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置
医学的检查和/或治疗设备
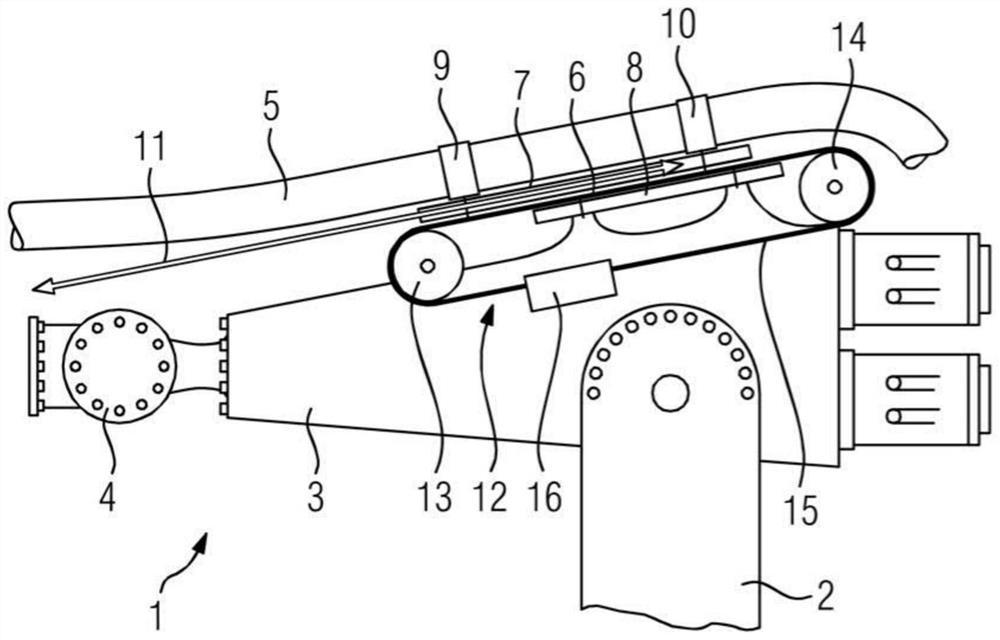
一种医学的检查和/或治疗设备(1,29),其包括具有可多轴移动的臂(3,31)的机器人(2,30);设置在该臂(3,31)上的C形臂(4);用于给C形臂(4)供电的电缆(5,32);器件,该器件用于在C形臂(4)移动时使电缆(5,32)跟随;其中所述器件设置在机器人(2,30)上或者设置在机器人(2,30)的部件上。
2021-11-05
访问量:97
具有线路引导装置的机器人臂
本发明涉及一种机器人臂(3),具有:能量线束(17),该能量线束具有中间线束段(17.3),中间线束段在线路引导装置(20)中被引导,线路引导装置包括电缆盘(21),电缆盘(21)具有至少在其部分周向上延伸的引导槽(22),当电缆盘(21)转动时,能量线束(17)的第一线束段(17.1)在该引导槽中被引导以至少部分地卷起和展开,并且电缆盘(21)具有中央的出口开口(23),能量线束(17)的第二线束段(17.2)从该出口开口被轴向地引出,其中电缆盘(21)被紧固在第二结构件上,并且中间线束段(17.3)在电缆盘的至少一个将引导槽(22)与出口开口(23)连接的至少一个连接通道(24)中被引导。
2021-11-02
访问量:23
一种用于将直线运动转变为旋转运动的自动伸缩机构
本发明公开了一种用于将直线运动转变为旋转运动的自动伸缩机构。它包括驱动系统、丝杆、导轨、安装支座、铰链、滑块、旋转轴和机械臂;安装支座包括连在一起的上支座和下支座;上支座包括底板和前后两侧的固定竖板;丝杆两端分别安装在前后两侧的固定竖板上;上支座的底板上设导轨;上支座的底板靠前部左右两侧有左右两块耳板;旋转轴两端通过轴承横向安装在左右两块耳板上;下支座的截面呈倒T形;左右两块耳板分别位于下支座上部两侧;滑块上部套装在丝杆外面,滑块能在导轨上做往复运动;铰链包括对称设置的左右两个;铰链一端与滑块中部固定连接;铰链另一端与机械臂后端固定连接。该自动伸缩机构具有结构设计合理、性价比高的优点。
2021-11-02
访问量:28
一种基于互联网的智能化装配机器人
本发明公开了一种基于互联网的智能化装配机器人,包括控制轨道及安装在其内部的驱动机台、连接臂一和连接臂二,所述连接臂一的远离驱动机台的一端与连接臂二的一端连接,所述连接臂二的另一端安装有连接腕,所述连接腕的底部固定安装有连接架,所述连接架的内部安装有平行夹齿,两个所述平行夹齿的内部均铰接有转动杆,位于同侧的两个所述转动杆远离平行夹齿的一端共同活动连接有连接柱。本发明通过激光发射器发射出激光,能够对连接架移动的方向和位置进行预定位,提高操作精度和效率,并且使用配料臂能够对平行夹齿进行配料,不需要驱动机台移动重复上料操作,影响操作精度,减少装配时间,提高装配效率。
2021-11-02
访问量:40
机械臂碰撞检测性能的评估系统
本申请属于机械臂检测技术领域,公开了一种机械臂碰撞检测性能的评估系统,包括:检测台,该检测台包括支架、可转动的碰撞面板、模拟负载装置、连接碰撞面板的转轴以及设置在转轴与模拟负载装置之间的扭矩传感器,扭矩传感器用于测量碰撞面板转动时在转轴上产生的扭矩,模拟负载装置用于在扭矩传感器上加载稳定负载;数据采集分析仪,该数据采集分析仪与扭矩传感器电性连接,数据采集分析仪用于获取待检测机械臂撞击碰撞面板时产生的且由扭矩传感器采集的扭矩数据,获取待检测机械臂的停机时间数据,根据扭矩数据和停机时间数据评估待检测机械臂的碰撞检测性能等级;该机械臂碰撞检测性能的评估系统可降低测试人员的人身安全风险。
2021-11-02
访问量:27
一种机械手的曳引驱动装置
本发明公开了一种机械手的曳引驱动装置,包括:机械手臂、立柱和曳引机构,所述立柱的侧壁上纵向固定有直线导轨,所述直线导轨与机械手臂的侧壁连接且机械手臂通过直线导轨做垂直移动,所述曳引机构安装在立柱的中部其包括曳引机、曳引固定架、同步带和同步轮。本发明通过曳引机来替代原有的配重箱,没有了配重箱,整体重量将减轻1/4左右,减少安装面结构材料的经济投入,同时还能避免配重箱在立柱内腔晃动造成的重心失衡,提高使用的稳定性和安全性;实现承接负载的可连续变量,提高负载能力,减少切换测试机调整配重造成的时间浪费;采用直线位移传感器、负载偏差传感器来对机械手进行实时监测,提高机械手在使用时的安全性。
2021-11-02
访问量:27
一种动力模组及足式机器人
本发明涉及足式机器人技术领域,具体公开了一种动力模组及足式机器人,该动力模组包括模组壳体、动力组件、行星组件、推力轴承和行星架轴承。其中,动力组件设于模组壳体内;行星组件包括行星支架、太阳轮、多个行星轮、齿圈和多个行星轴;行星支架转动设于模组壳体内;齿圈设于模组壳体内,多个行星轴设于行星支架,多个行星轮一一对应地设于多个行星轴;太阳轮啮合于多个行星轮之间且连接于动力组件的输出端;推力轴承抵设于模组壳体和行星支架之间。行星架轴承设于行星支架和模组壳体之间。通过推力轴承保证了动力模组输出轴的轴向负荷能力和倾覆刚度,通过行星架轴承保证了径向负荷能力,相比交叉滚子轴承,成本低廉,易于制造。
2021-11-02
访问量:19
一种工业机器人及其避障机构的使用方法
本发明公开了一种工业机器人及其避障机构的使用方法,包括底座、防撞板和机器主体,所述底座的正面和背面均安装有防撞板,所述底座的顶部安装有机器主体,所述机器主体的内壁安装有分隔板,所述分隔板的底部安装有两组电动伸缩杆,所述电动伸缩杆的底部安装有移动板,所述移动板的顶部安装有放置框,所述机器主体的两侧外壁均安装有电动收缩筒。本发明通过安装的三角轮具有跨越障碍和楼梯攀爬的功能,增加了机器人的灵活性,其在受到撞击时可通过伸缩弹簧和防撞板缓解冲击力,继而可减小机器人受到的损伤,机器人在行驶不平路段两边时晃动时,电动伸缩筒可带动支撑板向下移动,其高度略高于行走轮,可在机器人两边晃动时,作为其支撑,避免倾倒。
2021-11-02
访问量:21
一种双臂协作机器人激光光纤线束的破损防护装置
本发明涉及机器人激光光纤线束技术领域,公开了一种双臂协作机器人激光光纤线束的破损防护装置,包括保护罩本体,所述保护罩本体包括第一壳体和第二壳体,所述第一壳体和第二壳内壁均均匀横向分布有弹簧,所述两个壳体内壁弹簧前端均设置有夹板,所述第一壳体内沿长度方向均匀设置有卡扣。本发明通过第一壳体和第二壳体对接拼合构成线束通道,通过弹簧挤压夹板使两夹板贴合夹持光纤线束,弹簧作用下外力挤压壳体不会直接作用于光纤线束,保护了光纤线束,夹板贴合这种方式也解决了摆动拉扯光纤线束对其造成的损坏,也能够使得线束规整,同时方便装配和保护内部光纤线束,较为实用,适合广泛推广和使用。
2021-11-02
访问量:33
机器人组装用定位机构
本发明涉及机器人组装的技术领域,特别是涉及一种机器人组装用定位机构,其方便对机器人进行组装,增加机器人组装的效率,增加便利性,提高实用性;包括底板、立板、横梁、安装座、第一转轴、第一连接座、组装台、底座、第二连接座、转动手柄、第三连接座、连接杆、螺母座、螺杆、压块、动力机构,立板固定安装在底板上,横梁安装在立板上,安装座安装在横梁上,第一转轴安装在安装座上并相对转动,第一转轴与立板相对转动连接,第一连接座安装在第一转轴上,组装台安装在第一连接座上,底座安装在组装台上,第二连接座安装在底座上,转动手柄与第二连接座转动连接,第三连接座与转动手柄转动连接,第三连接座安装在连接杆上。
2021-11-02
访问量:24
«
1
2
3
4
5
6
7
8
...
25
26
»
热门专题
左旋肉碱的制备方法 左旋肉碱生产工艺 左旋肉碱相关技术资料
免烧砖的制造方法及应用 免烧砖相关专利技术
水溶肥制备方法和应用 水溶肥相关技术资料
保温砂浆及其制备方法 保温砂浆相关技术资料
聚羧酸减水剂的配方 聚羧酸减水剂制备方法 聚羧酸减水剂相关技术资料
除湿机的结构设计 新型工业除湿机的制造 除湿机相关技术资料
脱硫剂的制备方法及系统 脱硫剂数字化评价装置及其评价方法
硅基材料的生产工艺 新型硅基负极材料 硅基材料相关生产制备工艺
柔性电池的制备方法 柔性电池的工艺原理 柔性电池相关生产制备技术资料
汽车充电桩的设计原理 新型汽车充电桩 汽车充电桩的生产制造设计工艺
技术分类
记录或重放系统
流体的
电的
程序控制
流体的
电的
以机械手元件定位装置为特征的
以部件结构为特征的
以多铰接爪臂为特征的
除工作头自身运动外,至少有一个爪臂旋转,例如柱面坐标型或极坐标型
以臂的运动为特征的,例如直角坐标型的
程序控制机械手
微型机械手
与操作人员控制室连接的机械手
导轨也运动,例如移动桥式起重机型的
沿导轨移动的
装在车轮上或车厢上的机械手
有伺服机构
有主单元和从单元的平行四边形偶联器
主从型机械手,即兼有控制单元和被控制单元共同完成相应的空间运动
手套式操作箱,即用人手放入装在容器壁上的手套中操纵机械手的容器;所用的手套
带操纵装置的容器
安全装置
观察装置
读出装置
与机械手配合的附属装置,例如用于监控、用于观察;与机械手组合的安全装置或专门适用于与机械手结合使用的安全装置
挠性的
可旋转的
可伸长的
爪臂
肘节
接头
带挠性的抓手构件
带三个或多个抓手构件
有抓手构件
带真空或磁力夹持装置
带遥控卸下或更换夹头或其零件的装置
随动的
夹头
通过读出装置,例如观察或触摸装置
拨打电话
下载资料
栏目导航
会员登录